Hier handelt es sich um eine werkstückorientierte Programmierung im 3D-Raum mit Hilfe eines PC und einer Simulationssoftware. Dabei wird zuerst das Werkstück als 3D-CAD Geometrie in das Programmiersystem importiert und dann die Bewegungen des Roboters festgelegt. Bei der Pfadgenerierung und Definition der Prozessparameter stehen eine Reihe von Automatik-Funktionen sowie in der Steuerung hinterlegte Datenbanken zur Verfügung.
Es ist ein einfaches, mit der Programmierung der Roboteranlage in der Werkshalle identes System mit einem entscheidenden Vorteil: Unter Verwendung des Programmierhandgeräts K6 wird eine idente Software für alle Berechnungen verwendet. Daher entfallen jegliche Konvertierungen von Maschinenparametern oder Roboterprogrammen. Sämtliche Programmänderungen an der Anlage können ohne Konvertierungsverluste am Offlinesystem weiterverarbeitet werden.
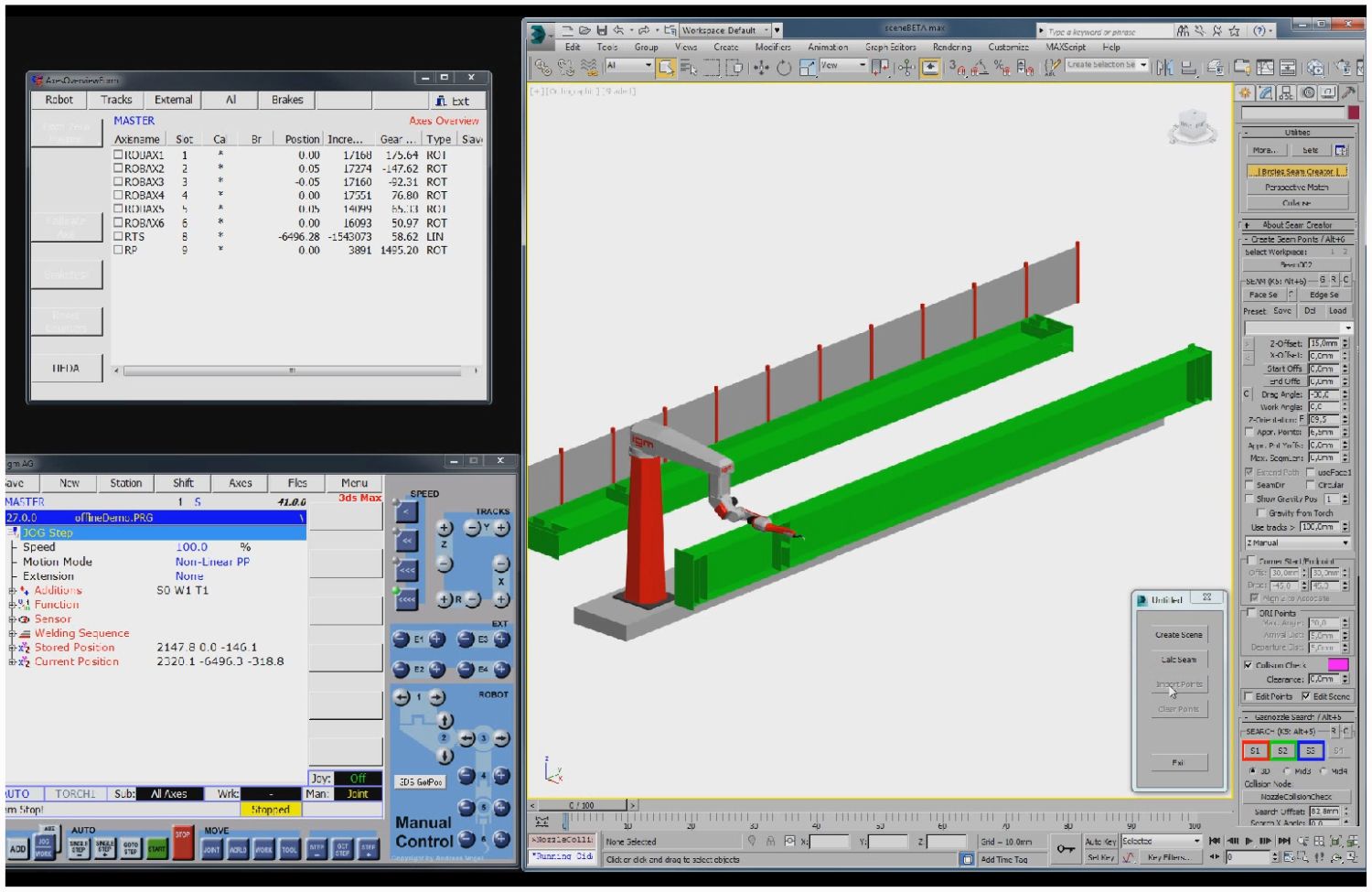
Spezialfunktionen:
- Seam Creator – automatisch erzeugte Schweißnähte durch einfaches Klicken auf beide Flächen
- Intermediate Points – Anlegen von Zwischenpunkten für weiche Brennerbewegungen
- Search Drives – automatische Suchfahrten für generieren von Versetzschritten
- iCAM offline – Template Erstellung mit virtueller Kamera