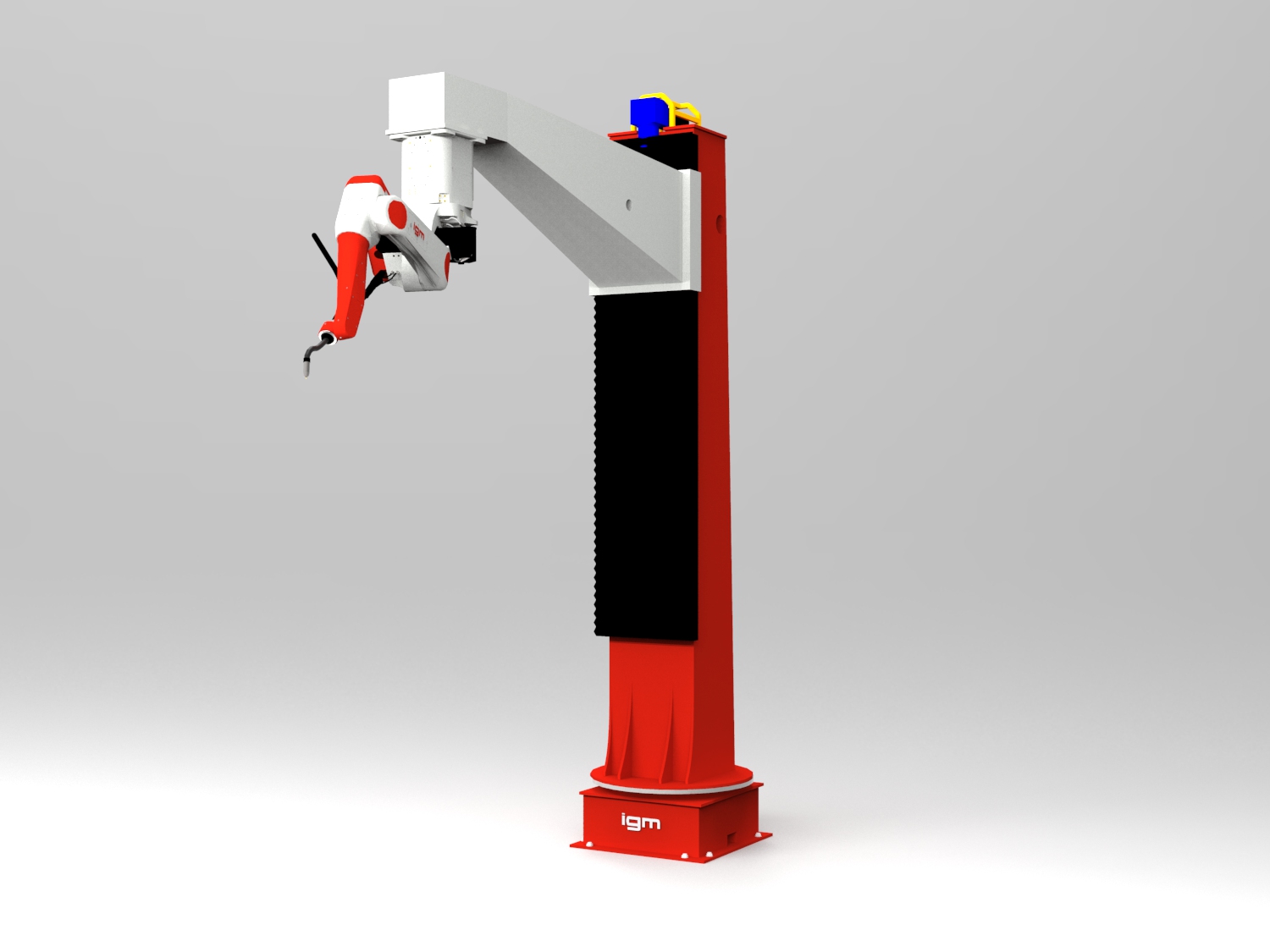
igm Werkstückperipherie
Die Werkstückperipherie dient zur Aufnahme, Positionierung und Bewegung der Werkstücke. Die externen Achsen sind als NC-Achsen realisiert, vollständig in die Steuerung integriert und zusätzlich mit einer Handsteuerung ausgerüstet. So kann die Werkstückmanipulation in die Schweißbewegung eingebunden werden. Die Programmierung erfolgt gemeinsam mit den Roboterachsen nur über das Programmierhandgerät.
Alles dreht sich um die perfekte Peripherie für jedes Werkstück
Zur Verfügung steht eine große Anzahl unterschiedlicher Drehmodule, als Einzelachse oder kombiniert mit bis zu 3 Achsen, mit einer Tragfähigkeit von bis zu 25 Tonnen, bei Bedarf auch mehr.
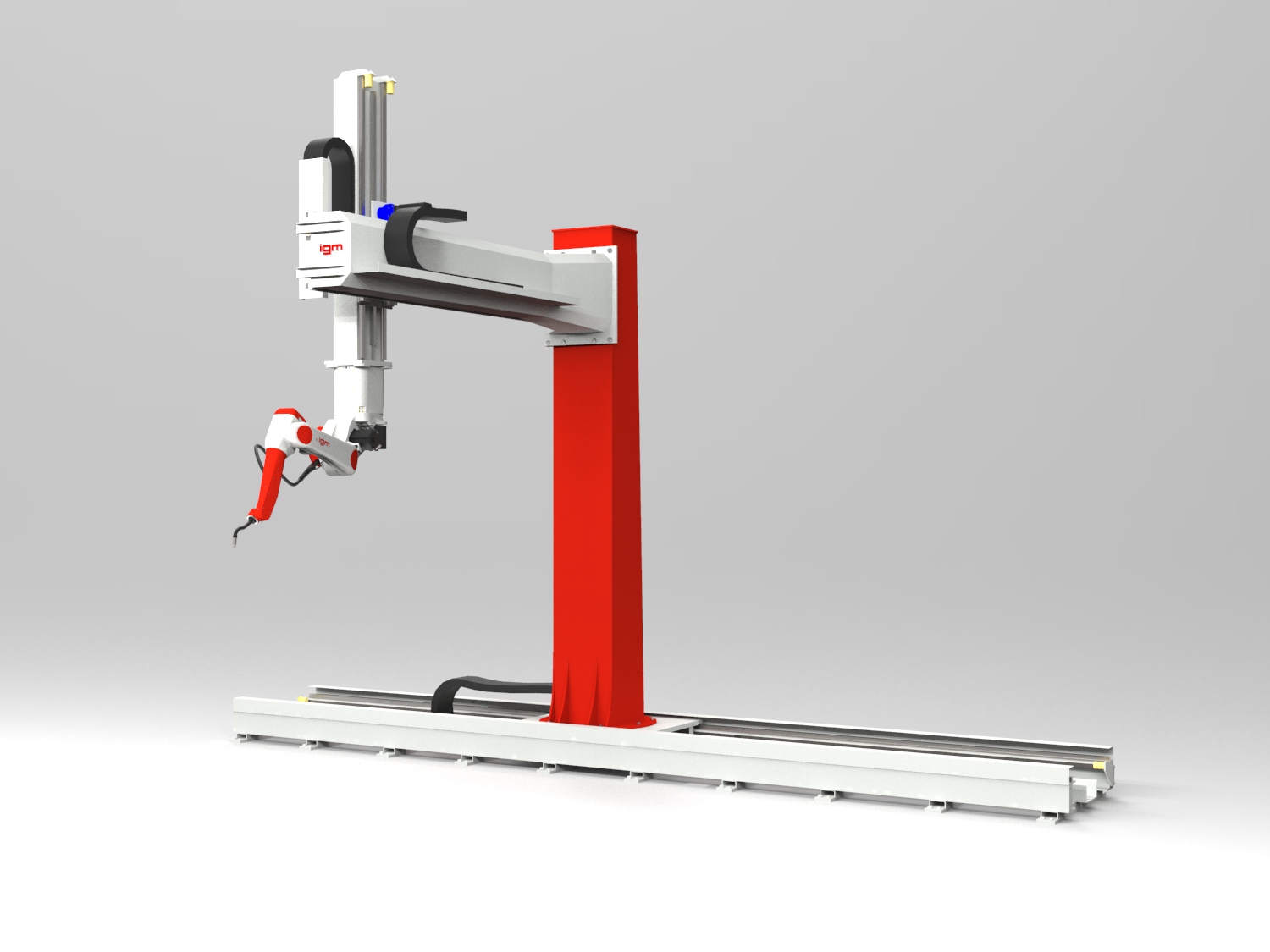
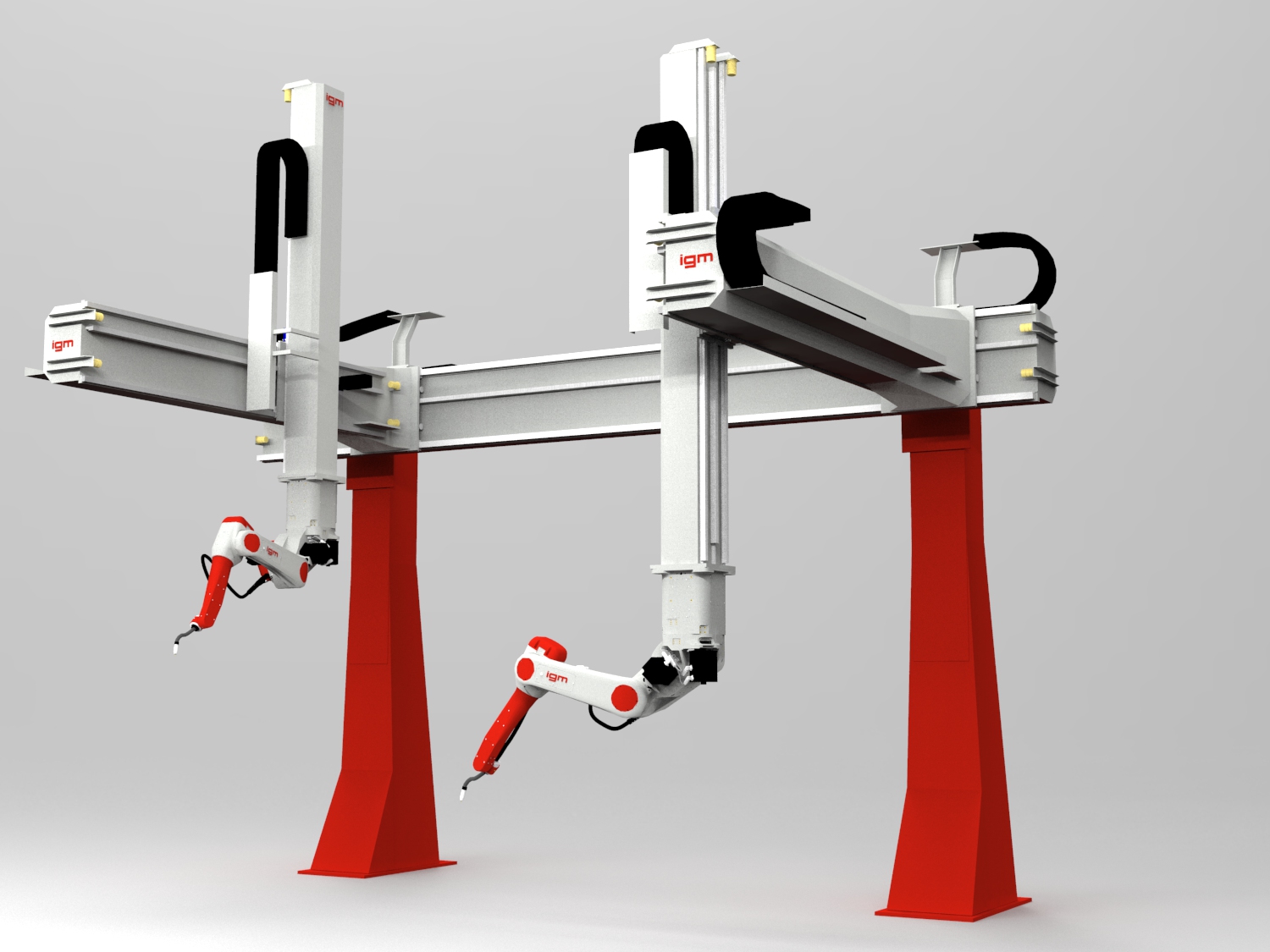
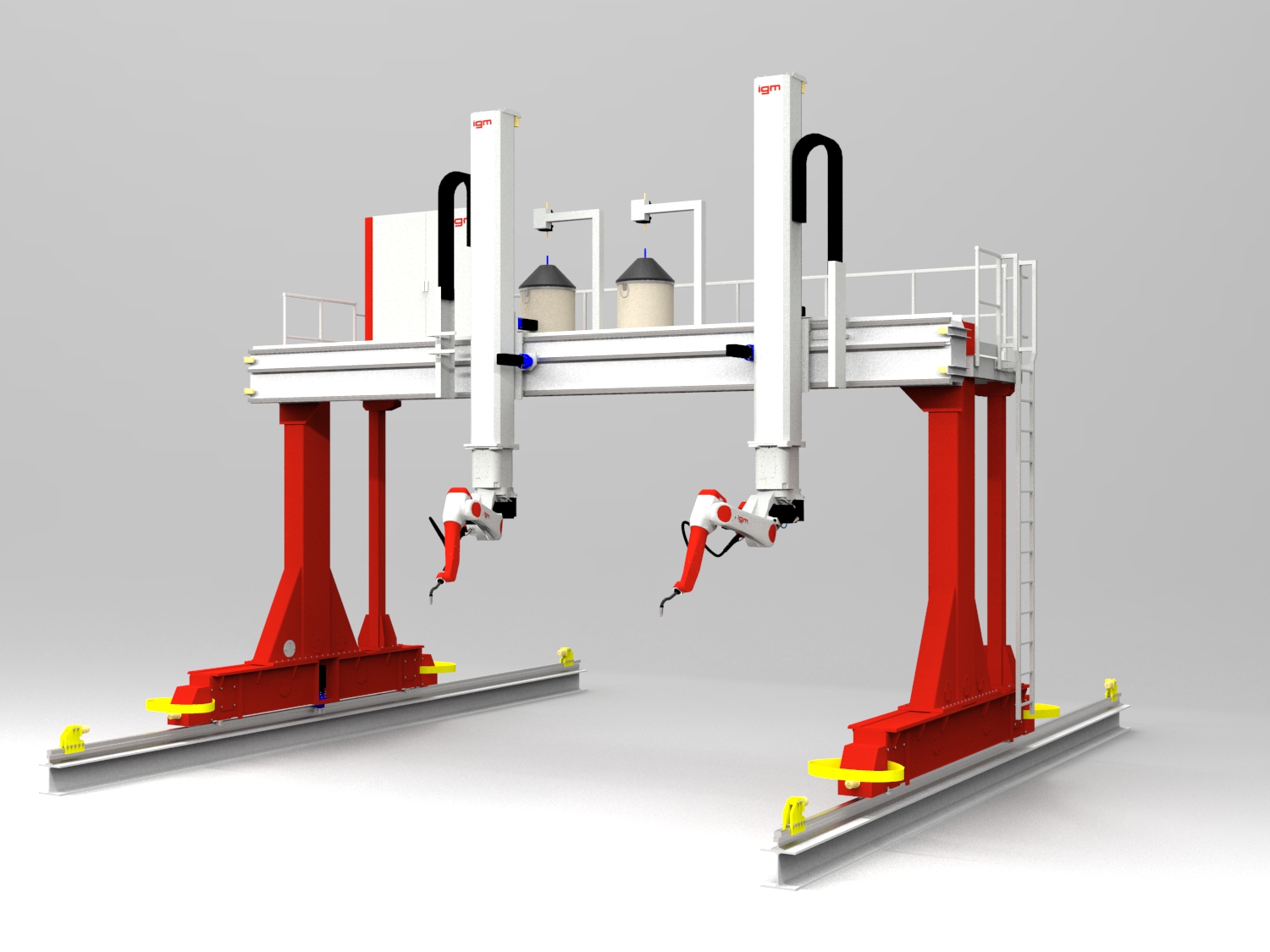
igm Portalsysteme
Für das Schweißen von großvolumigen Bauteilen bietet igm Portalsysteme an. Sie werden für den jeweiligen Anwendungsfall kundenspezifisch zugeschnitten.
Ein oder zwei Roboter können auf einem Portal montiert werden. Da die Portalachse in die Robotersteuerung integriert ist, kann sie für die Schweißfahrt eingesetzt werden. Zur Standardausrüstung der Portale gehören beidseitiger Zahnstangenantrieb mit AC-Servomotoren, stabile Radkästen mit integrierter Seitenführung auf massiven Schienen, mitfahrender Schaltschrank, Stromquelle und bei Bedarf auch ein Steuerpult.