Robonet
igm Software für Netzbetrieb und Fernzugriff von einem beliebigen PC auf die Robotersteuerung
- Transfer von Daten auf eine einzelne oder auf mehrere Maschinen
- Fernüberwachung der Schweiß- und Betriebsdaten
- Anzeige des Displays des Bedienhandgeräts auf Ihrem Notebook oder PC
ISDES embedded
ISDES EMBEDDED ist ein Schweißnaht- und Betriebsdatendatenerfassungssystem zur Überwachung, Dokumentation und Qualitätssicherung von Schweißprozessen sowie zur Auswertung von Betriebsdaten an teilweise, oder voll automatisierten Schweißroboteranlagen. Das auf der Steuerung integrierte ISDES bietet die Möglichkeit, die für die Qualität entscheidenden Parameter sowie die betriebstechnisch relevanten Daten zu erfassen, online anzuzeigen, aufzuzeichnen und auszuwerten.
isdes embedded Funktionen
- direkt in die Steuerung integriert > Parametrierung auf dem PHG
- gespeicherte iSDES Daten sind in Excel weiterverarbeitbar
- Datennachverarbeitung ist am PC vom Anwender durchführbar
- automatische Zuordnung der Schweißdaten zum Programmschritt
- externe Sensoren im Schaltschrank integriert
Smartstep
Smartstep ist ein Softwareprodukt für igm Robotersteuerungen, welches die Generierung eines interaktiven Schrittprogramms mit Templates durch Programmassemblierung erlaubt.
Zeit und Kosten für die Erzeugung von Roboterprogrammen sind von entscheidender Bedeutung, insbesondere bei kleinen Batchgrößen. Smartstep bietet eine einfache Alternative für die Montage von zuvor generierten Programmteilen, welche in einer Bibliothek vorbereitet und gespeichert sind. Es ermöglicht ein ausführbares Roboterprogramm mit einem interaktiven Eingabefenster zu bauen.
Smartstep wird hauptsächlich für die Programmierung von Werkstücken mit einer begrenzten Anzahl von sich wiederholenden Nähten verwendet.
iPAT (igm program assembly tool)
iPAT (igm Program Assembly Tool) ist ein Softwarepaket, das für die Anpassung und Assemblierung von Schrittprogrammen eingesetzt wird. Auch die direkte Eingabe von numerischen Werten hinsichtlich Werkstücklängen und Positionsabweichungen kann über iPAT erfolgen und somit die Anpassung von Roboterprogrammen an unterschiedliche Geometrieverhältnisse leicht vorgenommen werden. iPAT beschränkt sich dabei ausschließlich auf lineare Verschiebungen.
Ziel von iPAT ist es, verschiedene Templateprogramme hintereinander zu einem Zielprogramm zusammenzufügen. Dabei werden bestimmte Schrittbereiche aus den Templateprogrammen herausgenommen und über den Roboter oder die Fahrbahn verschoben zu einem Gesamtprogramm kombiniert. iPAT kann auch für Verschiebungen innerhalb nur eines einzelnen Schrittprogramms angewendet werden.
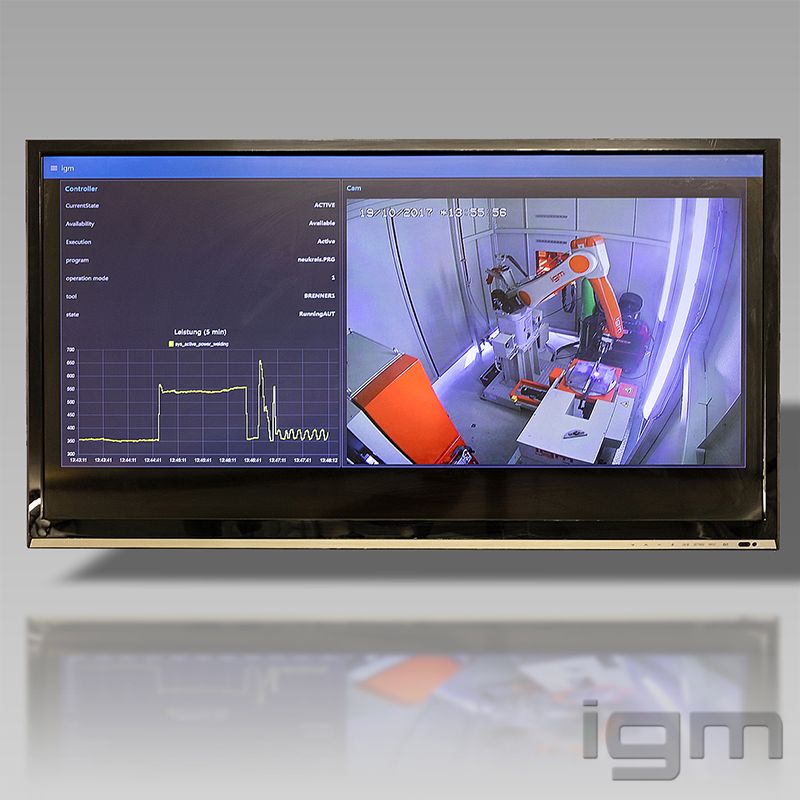
i4i Visualisierungssoftware
i4i stellt eine Vielzahl unterschiedlicher Visualisierungen und Reports über den Status der Roboteranlage zur Verfügung. Über eine SPS-Schnittstelle kann es einfach mit der Maschine verknüpft werden und erlaubt eine Integration von unterschiedlichen Endgeräten, sei es ein PC, ein Tablet oder ein Smartphone. Es können auf einen Blick alle Roboterstationen mit deren aktuellen Status betreffend Programmlaufzeit/verbleibende Programmlaufzeit sowie das aktuelle Programm dargestellt werden.
Des Weiteren kann eine Live-Anzeige jeder Roboterzelle gemeinsam mit diesen Statusmeldungen angezeigt werden. Das Werkstückverfolgungstool zeigt die Entstehung des Werkstücks mit allen Bearbeitungsschritten inklusive deren Notstrategien. Um abschließend den Produktionsprozess analysieren zu können, bietet die SQL-Datenbank eine Vielzahl an Auswertungsmöglichkeiten. Beispielsweise können die Verfügbarkeit der Maschine und deren Fehlerwahrscheinlichkeit sowie die Produktivität pro Schicht/Zeitraum ermittelt werden. Die Benutzeroberfläche wird unter Beibehaltung aller Standardfunktionen individuell im Zuge der Inbetriebnahme der Roboteranlage angepasst.