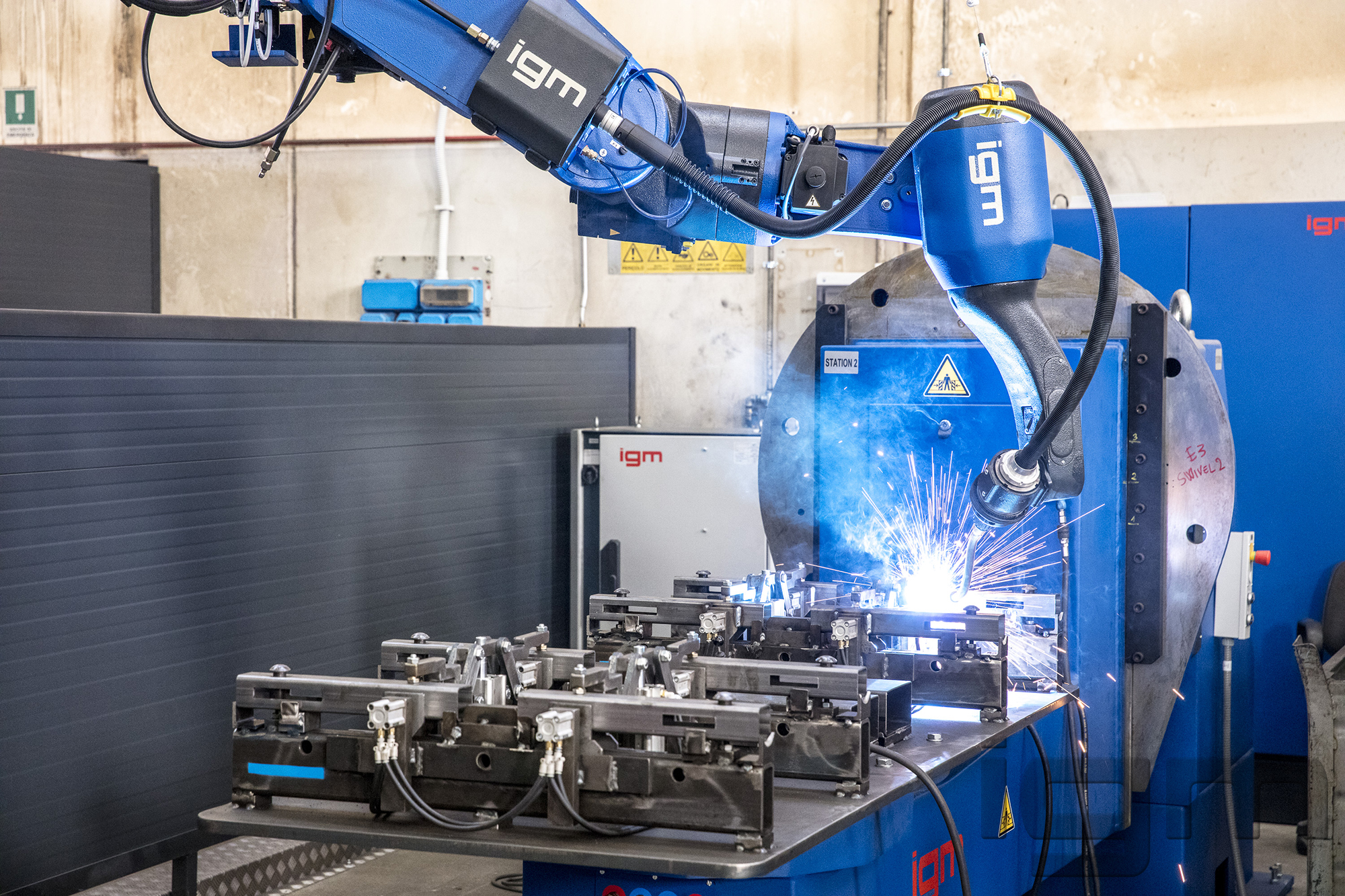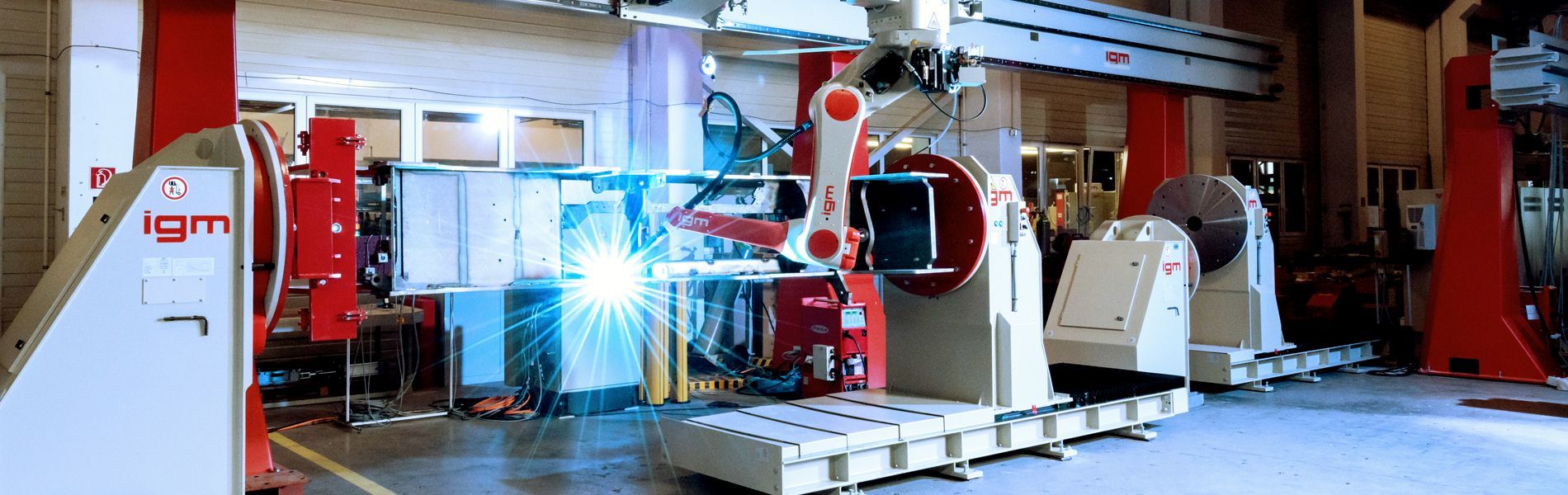






Alignment clamps allow the union between the steel and aluminium panels and the union between panels and internal corners. The recently bought robot system, a rotating arm RST with 2 L-arm manipulators RWM2, produce 5,000 units per month. The fixture frame takes up 8 parts, for which the manual welding time amounts to 12 min while robot welding time comes down to only 6 min. The crucial part is the welding of a bolt inside a square tube, which can be performed thanks to the slim design of the welding torch. Due to the exactness of the fixture, no touch sensing before welding is necessary.
The robot are able to weld steel and aluminium without major changes of the equipment. Thus the aluminium tie rods are produced in the second station of the same robot cell. The round seams of the base plate to rod are welded in gravity using the swivelling and rotating axes of the L-manipulator within a cycle time of 90 s.
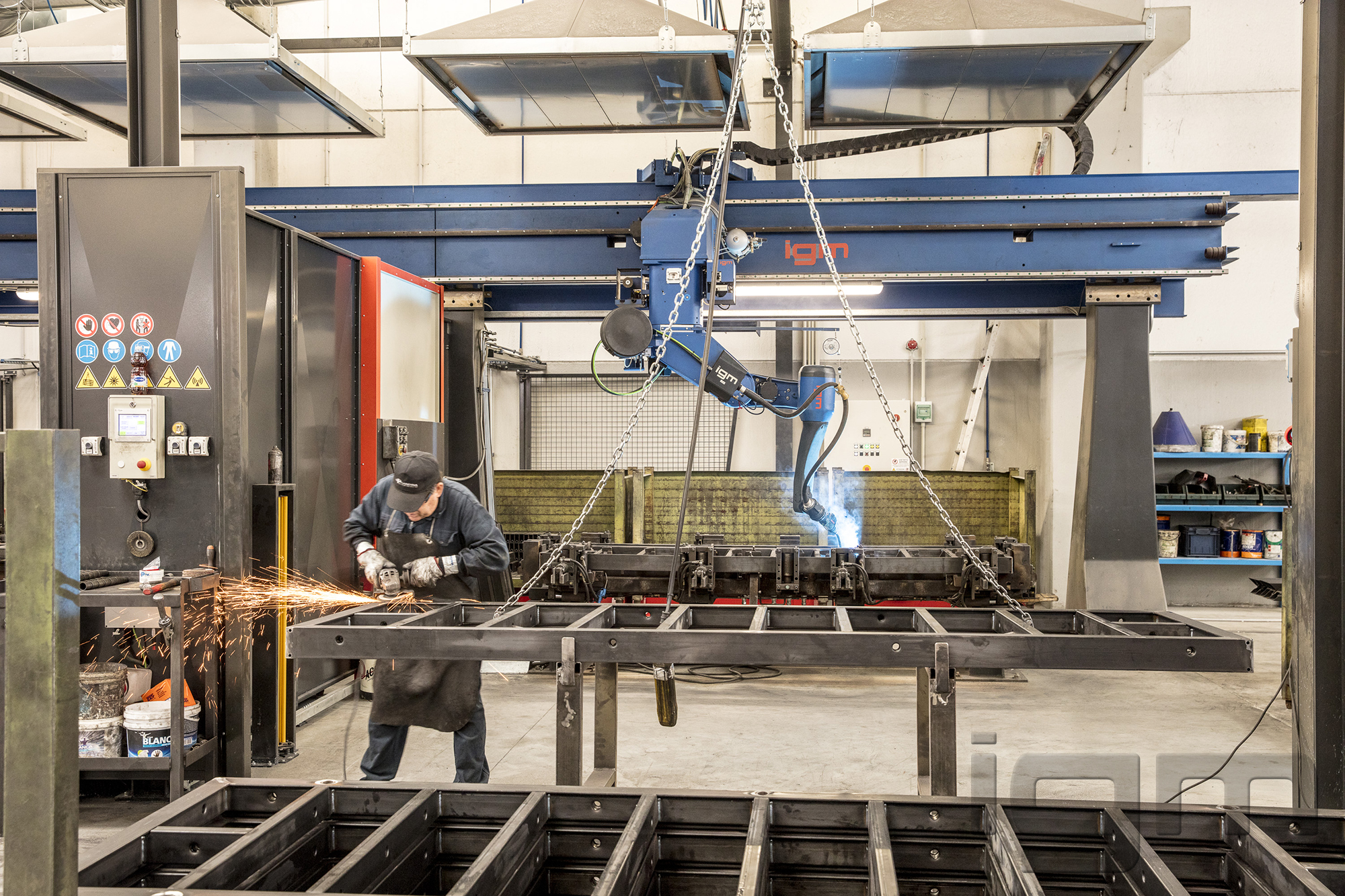
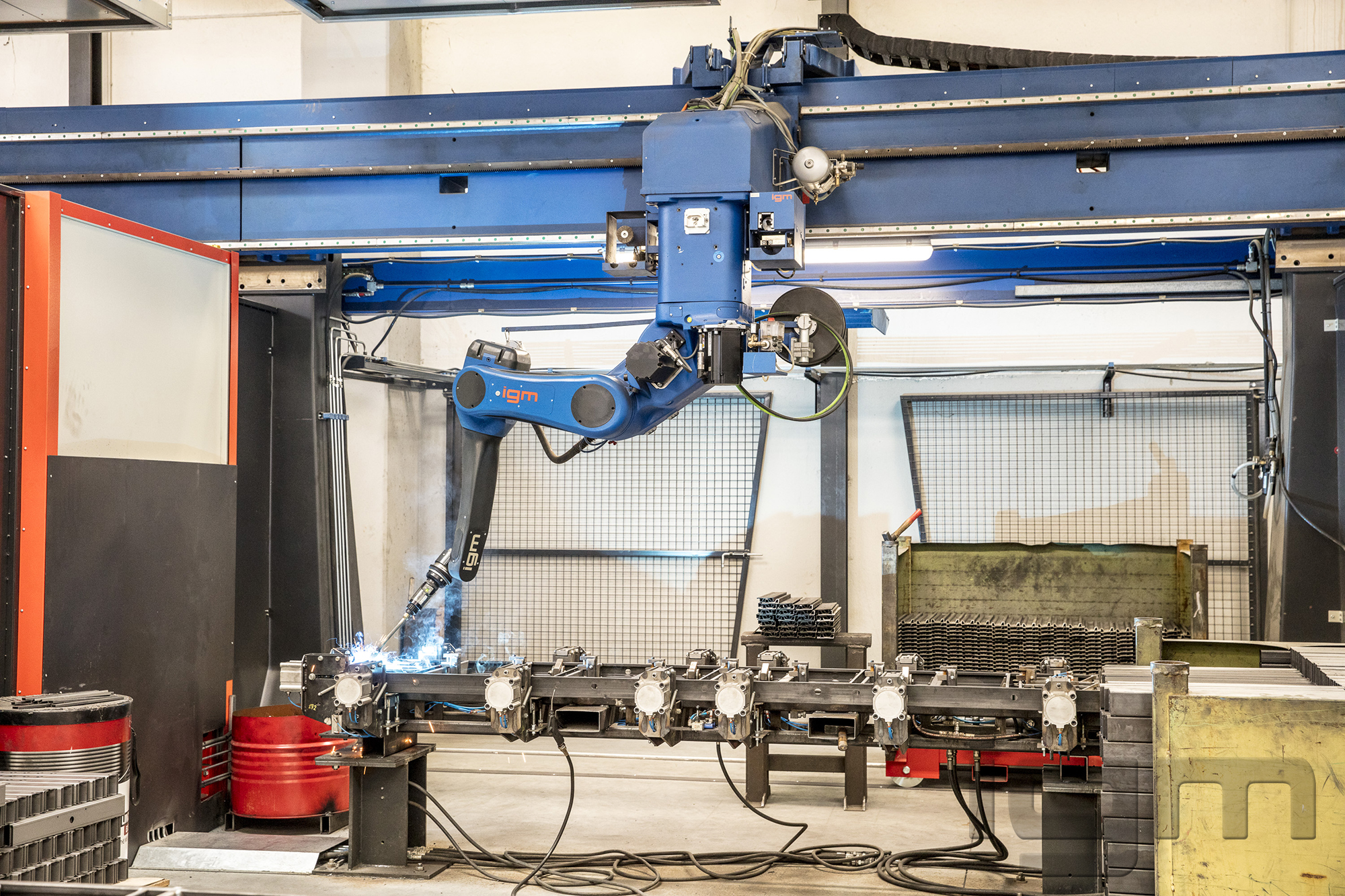
The panel frames of various lengths and widths are welded in a robot system consisting of a 21m longitudinal slide split up into 4 working stations. Each work stations features in fixed structures carrying the fixtures for the frames. This system produces 2,000 units per month, in both steel and aluminium. 2 workers are employed for operating the robot, for loading and unloading the parts and for final works like grinding.
Stefano Zonta, production manager, has been working with igm robot since 20 years. He knows very well all controller versions from K3. After a refurbishment of the older robot system, today GPrandina operates only with K6. Basing on the long lasting experiences in both, manual and robotic welding, they are proud to design all fixtures by themselves, hydraulically and pneumatically operated. Those fixtures are so exact, that search drives of the robot can generally be avoided and thus cycle times can be drastically reduced.