






Fully mechanized production of dumper truck bodies from the beginning
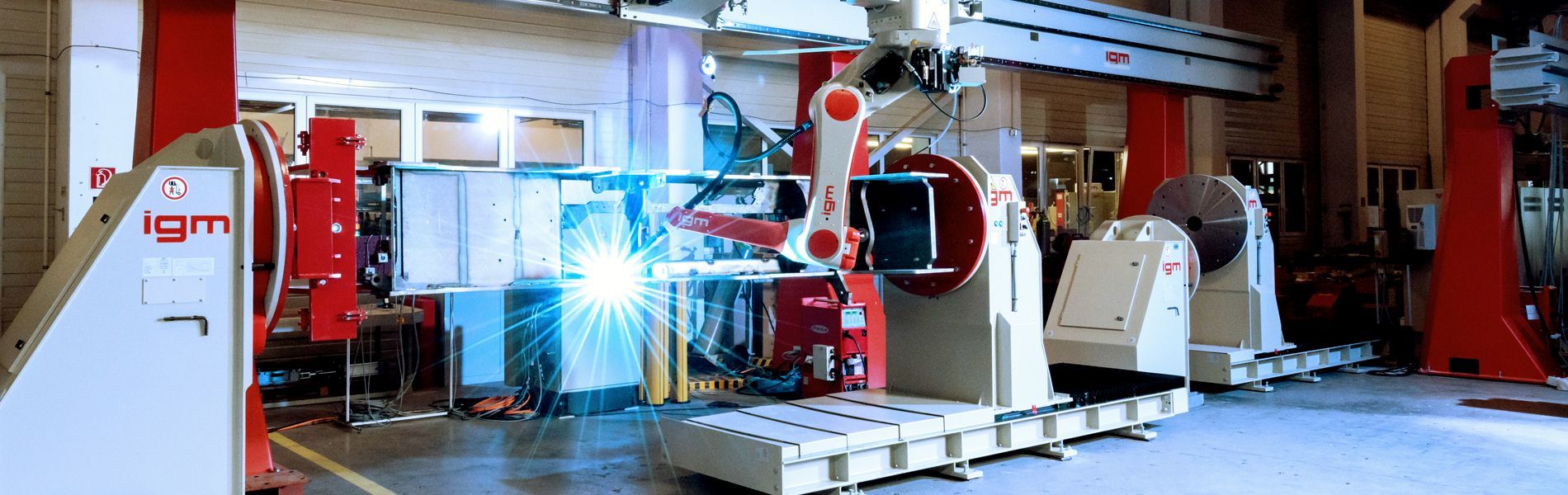
Automation was the focus of the expansion of the Eisenach plant right from the start. The central aspect of this concept is the fully mechanized welding of the dumpers in two stages: First, the rear and end walls are manufactured in the smaller robot cell. This cell consists of a centrally arranged rotating-lifting column with a 7-axis robot RTE 499 on a 3.5 m long cantilever. The nominal working area of 5.2 m in diameter and 4.5 m in height allows all seams (fillet seams) to be welded to the walls in gravity position. For this purpose, the workpieces are picked up by an L-manipulator and positioned accordingly.
For the second automatic processing step, the dumpers are loaded in the stations of the large robot system using the shop crane. Here, the 6-axis robot travels on a 21 m longitudinal slide system that holds a cross and vertical slide. The limited hall height of 7 m required the telescopic version of the vertical slide. Despite a stroke of 2 m and a turning center height of the turning devices of 2.3 m, all dumper bodies can be rotated freely and the robot RTE 496 reaches all seams of the bodies in PA position. The turning device is fully integrated in the robot controller and can be loaded with 10 t. The roller block is built on a motor-driven displacement track and can be operated under program control in different positions for the respective sizes of the dumper bodies. The faceplate distance of the turning devices ranges between 5,500 mm and 7,500 mm. The fixture was developed in collaboration between Bell and igm.
A camera for the robot
The inevitable tolerances when assembling the dumper elements represent a challenge for a welding robot. To ensure the required welding quality, the robot was equipped with an iCAM laser camera. This recognizes the exact position of the seam and guides the robot to the starting point. In addition to the position, the joint geometry is constantly measured during welding and the welding parameters (speed, wire feed, oscillation width, etc.) are adaptively controlled. For short seams or where the standard sensor technology (gas nozzle search and arcing seam search) is sufficient, the camera can be stored under program control.



