
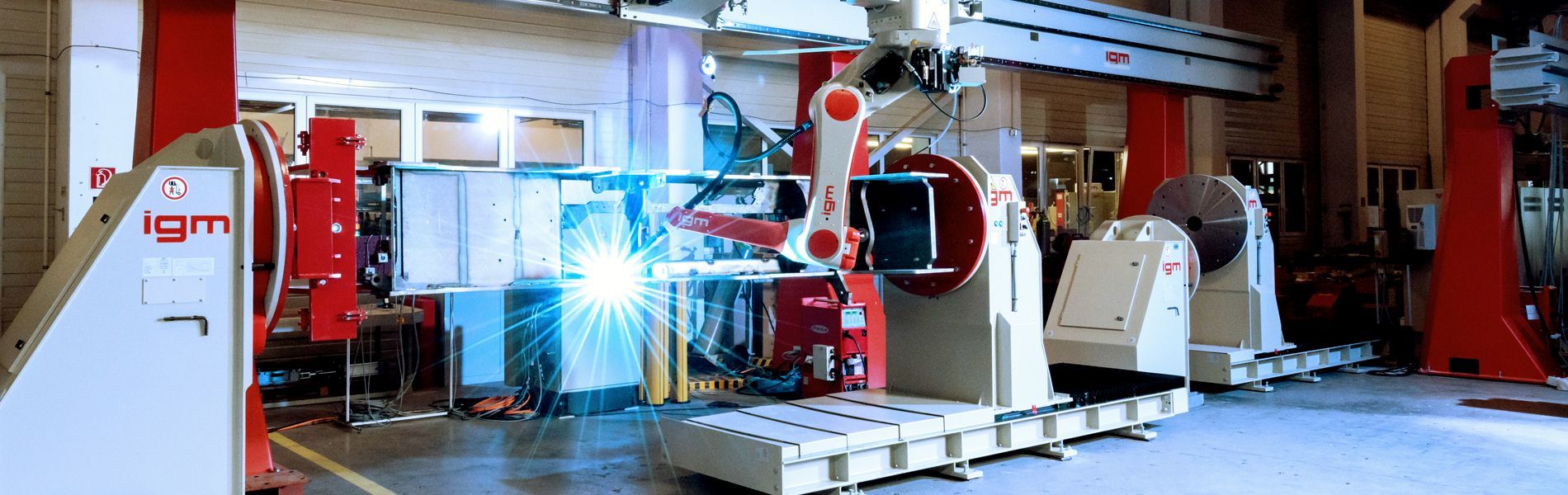






The robot with rotary base RTE 497 is assembled to the pillar’s rotary cantilever arm. The swiveling C-frame with head- / tailstock manipulator type RP/RF allows the movement of the workpiece in 2 axes.
The extremely compact design of this robot system allows flexible manufacturing on minimized floor space. As an option there can be provided a base plate, which allows a relocation of the robot in the work shop. Nevertheless, this is an adequate production system, which can be equipped with the full range of process and sensor options.
