






Leírás
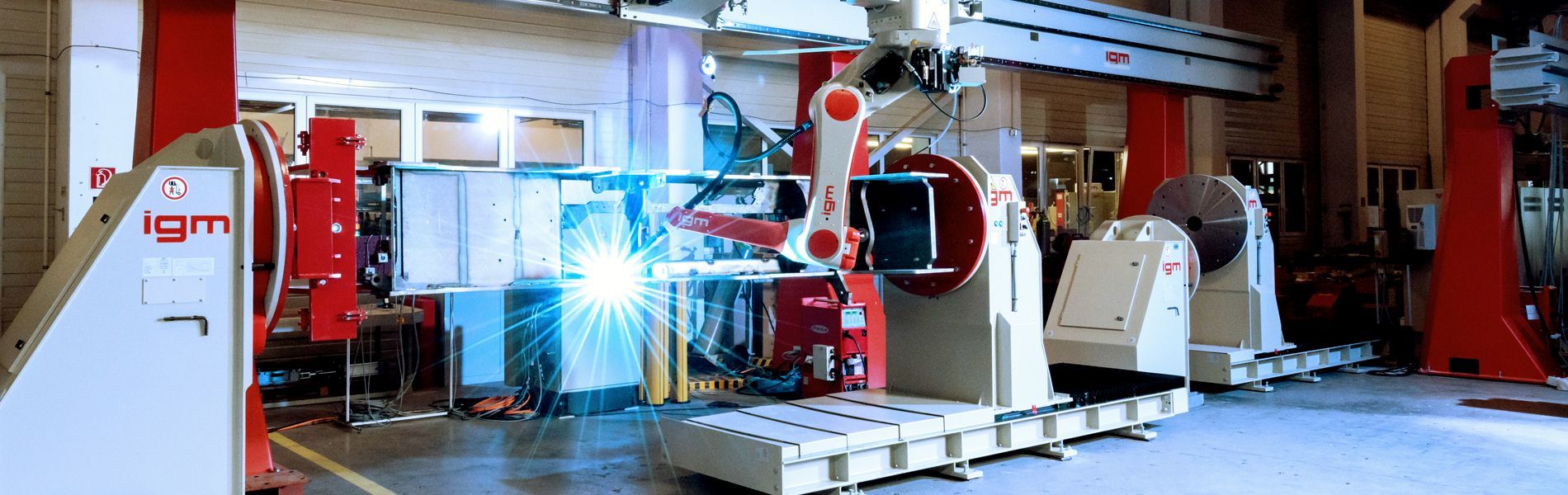
Az RP2 sorozat forgató-billentő manipulátora a munkadarabot két teljesen független tengely körül tudja pozicionálni.
A 25 t teherbírású változatnál a forgási középpont magasság 2300 mm, amivel lehetővé válik hengeres munkadarabok manipulálása, melyek belső átmérője 1000 mm … 4400 mm és a munkadarabok 0 és 90 ° között billenthetőek. A központosítás 8 metrikus csavarral belülről valósul meg és a rögzítésük manuálisan kívülről történik.
A manipulátor meghajtását 2 db tengelyvezérelt AC szervómotor speciális fogaskerekekkel és beépített digitális útadókkal végzik. A forgató-billentő készülék külső robottengelyként tervezett. A munkadarab manipulációja teljesen integrált a robot vezérlésébe, amivel a folyamat során lehetővé válik a munkadarab teljeskörű szinkronizált mozgatása.
A berendezés kialakításánál különös figyelmet fordítottak a kezelő biztonságára. A munkadarab horizontális helyzetbe állításánál a kezelőnek lépcsőn kell felmennie a 3,5 m magas emelvényre. Az emelvény radarfelügyelete biztosítja, hogy a berendezés addig nem működik, amíg valaki a veszélyzónában tartózkodik.
Műszaki jellemzők
- Hasznos teherbírás: 25.000 kg
- Forgási középpont magasság: 2.300 mm
- Billenési tartpmány: 90°
- Teljesen integrált a robot vezérlésébe.



