ROBONET
igm软件,用于从任意PC到机器人控制的网络操作和远程访问
将数据传输到一台或多台机器
远程监控焊接和运行数据
可以在笔记本电脑或PC上查看示教器显示屏
ISDES嵌入式
ISDES EMBEDDED是一种焊缝和操作数据采集系统,用于焊接过程的监控,文档编制和质量保证,以及部分或全自动焊接机器人系统的操作数据评估。 集成在控制系统上的ISDES提供了记录,监控和评估对质量以及操作相关数据具有决定性作用的参数的可能性。
isdes嵌入式功能
直接集成到控制器>编程控制台上的参数化
保存的iSDES数据可以在Excel中进一步处理
用户可以在PC上执行数据处理
自动将焊接数据分配给程序步骤
外部传感器集成在控制柜中
智能向导
Smartstep是igm机器人控件的软件产品,通过程序组装生成带模板的交互式步骤程序。
开发机器人程序的时间和成本非常重要,特别是小批量。 Smartstep为以前创建的porgram部分提供了一个简单的替代方案,这些部分已准备好并保存在库中。它允许使用交互式输入窗口构建可执行的机器人程序。
Smartstep主要用于编程具有有限重复接缝的工件。
iPAT(igm程序组装工具)
iPAT(igm程序组装工具)是一个非常强大的工具,可用于离线操作和步骤程序(模板程序)的组装。 iPAT允许输入与工件长度和位置变化相关的数值。
iPAT的目标是将模板程序彼此链接到目标程序。在这样做时,某些步长范围取自模板程序,将在机器人或轨道上移动,并通过简单的输入对话框一起复制到目标程序。 iPAT还可用于一步程序中的班次。
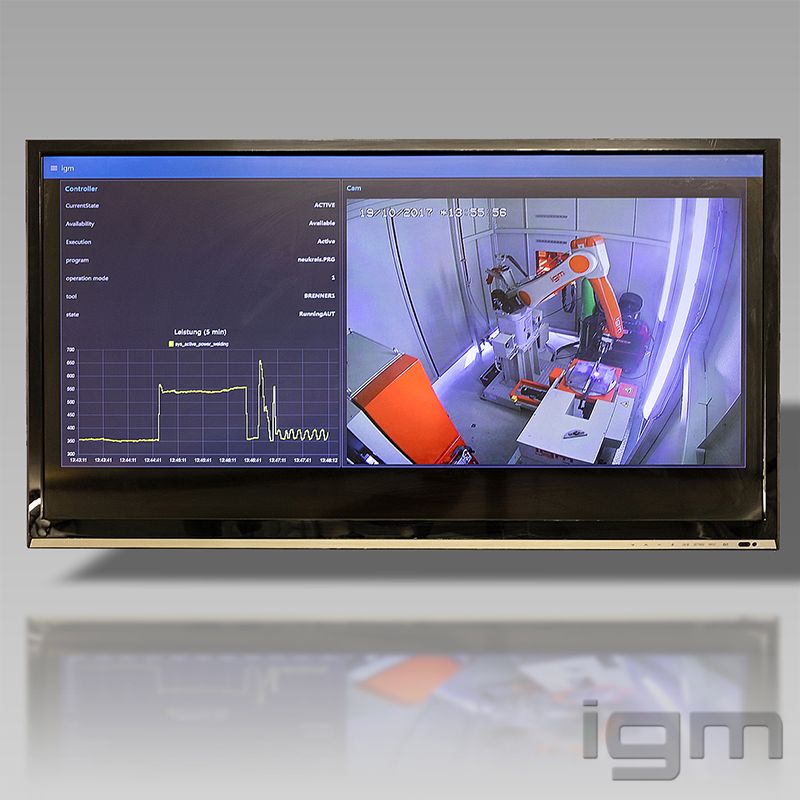
i4i可视化软件
i4i提供各种不同的可视化和机器人单元状态报告。使用SPS接口,可以轻松将其连接到机器。此外,它还可以集成各种设备,如电脑,平板电脑或智能手机。所有机器人工作站的状态都与实际运行时间和剩余运行时间以及当前程序有关,可以一目了然。
此外,还可以可视化每个机器人单元的实时显示及其状态报告。工件跟踪工具显示工件的开发以及所有处理步骤,包括其紧急策略。对于制造过程的结论性分析,SQL数据库提供了各种评估可能性。例如,可以计算机器的可用性及其误差概率以及每班次/时间段的生产率。用户界面在机器人单元调试期间设置,并根据用户需求单独调整,同时保持所有标准功能。