





Rugalmas gyártósorok alapkoncepciója
- FMS gyártósor egy munkadarabhoz és egy robot cellával
- FMS gyártósór több termékhez és egy robot cellával
- FMS gyártósor egy munkadarabhoz és több robot cellával
- FMS gyártósor több termékhez és több robot cellával
Gyártósorok komponensei
- Be- és kiemelő berendezések
- Görgős szállító asztalok
- Mozgató kocsik, eszközök
- Tároló állomások, pufferek
- Raktározó állomások
- Gyártósor vezérlés
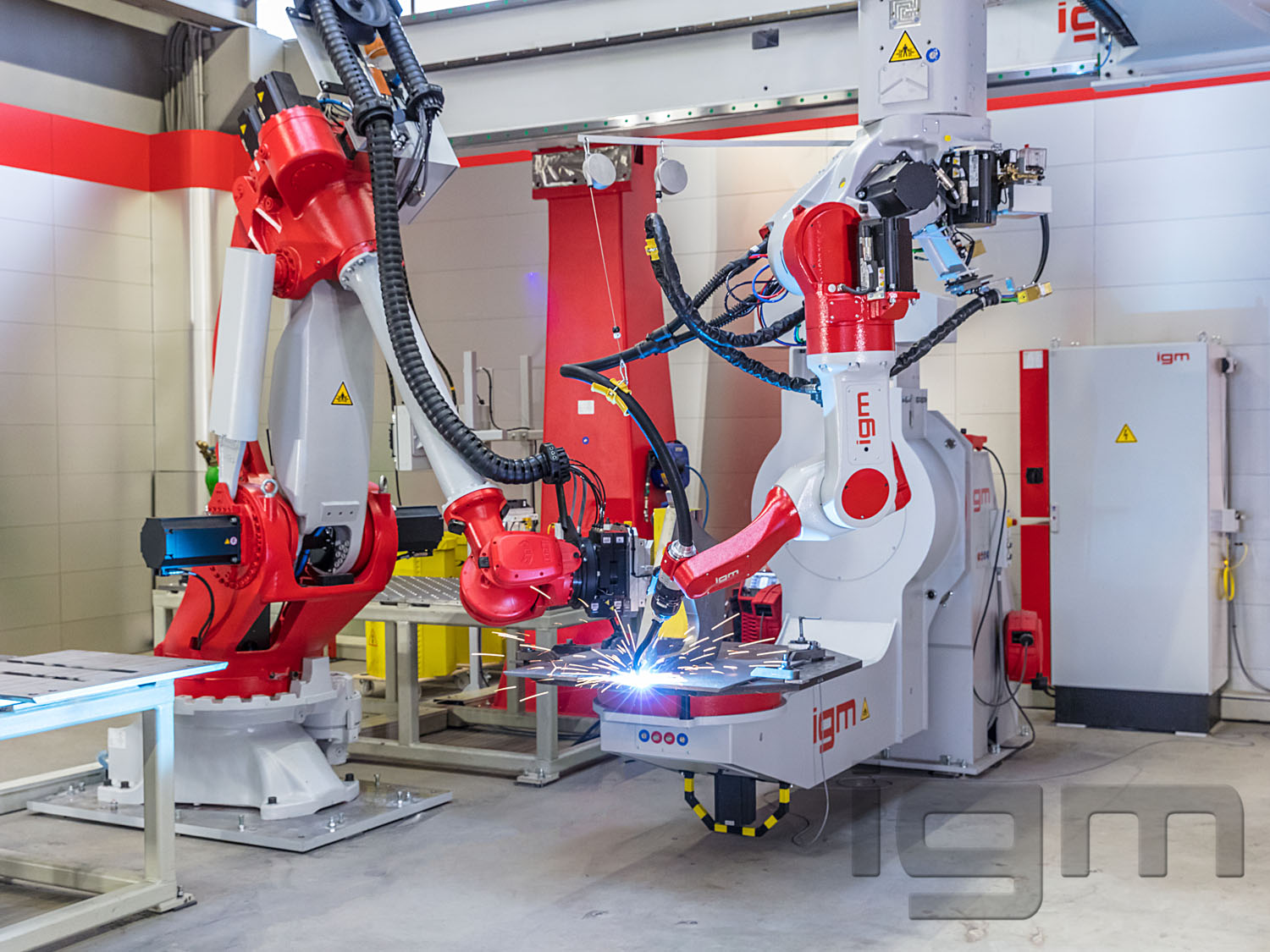
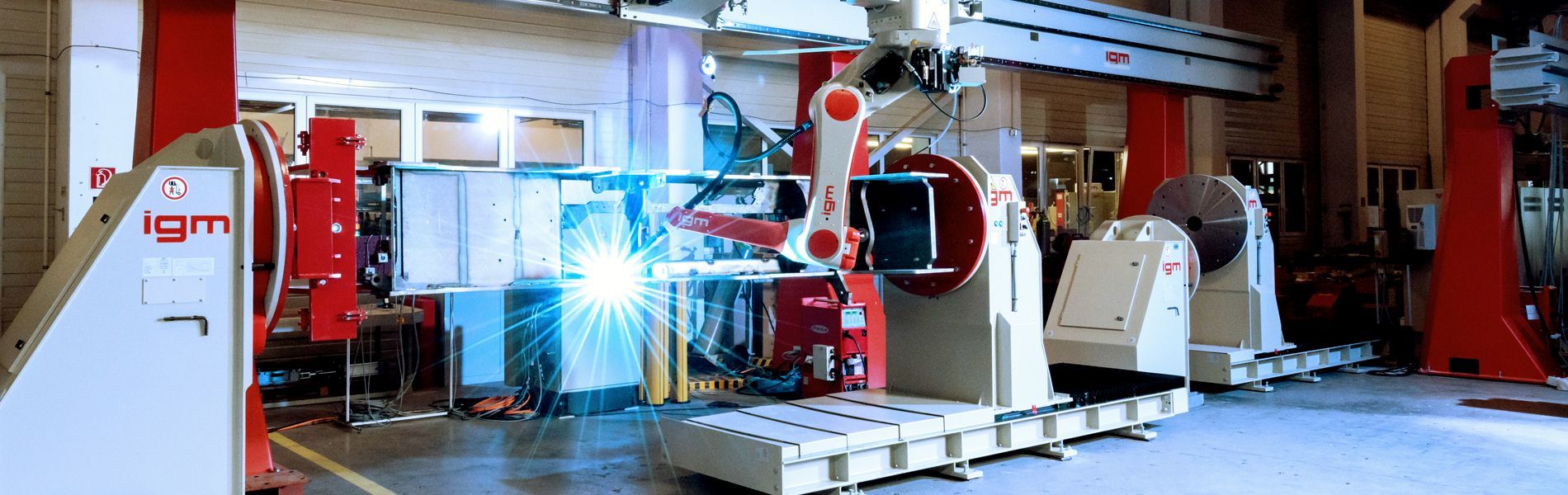
Teljes gyártósort robotcellákkal együtt egy központi számítógép vezérli. Grafikus információk segítik a kezelőt a gép gyors és tévesztésmentes működtetésében a folyamat ellenőrzésében.
A legkülönbözőbb méretű és fajtájú munkadarabok megmunkálásához speciális szerelő lapok, készülékek kerülnek alkalmazásra. A munkadarabok a paletták belső oldalára rögzítettek, míg a külső oldalon a forgató alaplapra szabadalmazott befogószerkezet biztosítja az automatikus befogást. Különböző ellenőrző berendezések biztosítják a szerelő lapok, paletták és készülékek pontos rögzítését.
A szállító kocsik beépített szatelit követéssel és emelő platóval viszik a munkadarabokat a robot állomáshoz, ahol a befogás automatikusan történik. A kocsik minden mozgató állomásnál pneumatikusan rögzítésre kerülnek, hogy a pozició elmozdulás nélkül pontosan megfeleljen a szatellit kocsi előírt helyzetének.