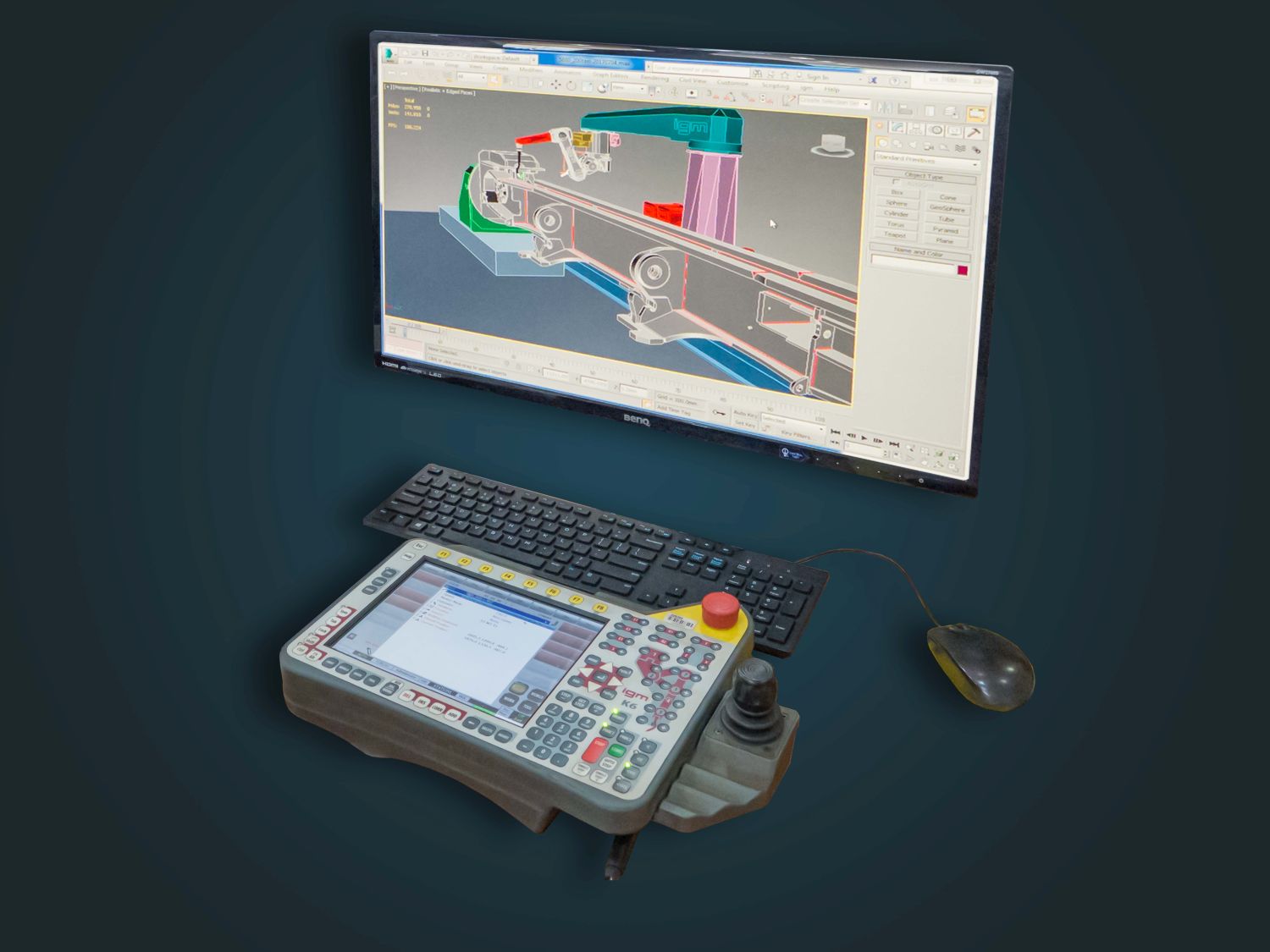






Offline programming involves work piece oriented programming in 3D mode using a PC and simulation software. The workpiece is first imported into the programming system as 3D-CAD geometry, then the movements of the robot are determined. For path generation and definition of the processing parameters, a number of automatic functions as well as data bases stored in the control system are available.
It is a simple system identical to that for programming the robot system on the factory floor, but with a significant advantage: When the teach pendant K6 is employed, an identical software is used for all calculations. This means that conversions of machine parameters or robot programmes of any kind are unnecessary. All program changes of the system can be processed using the offline system without any conversion losses.
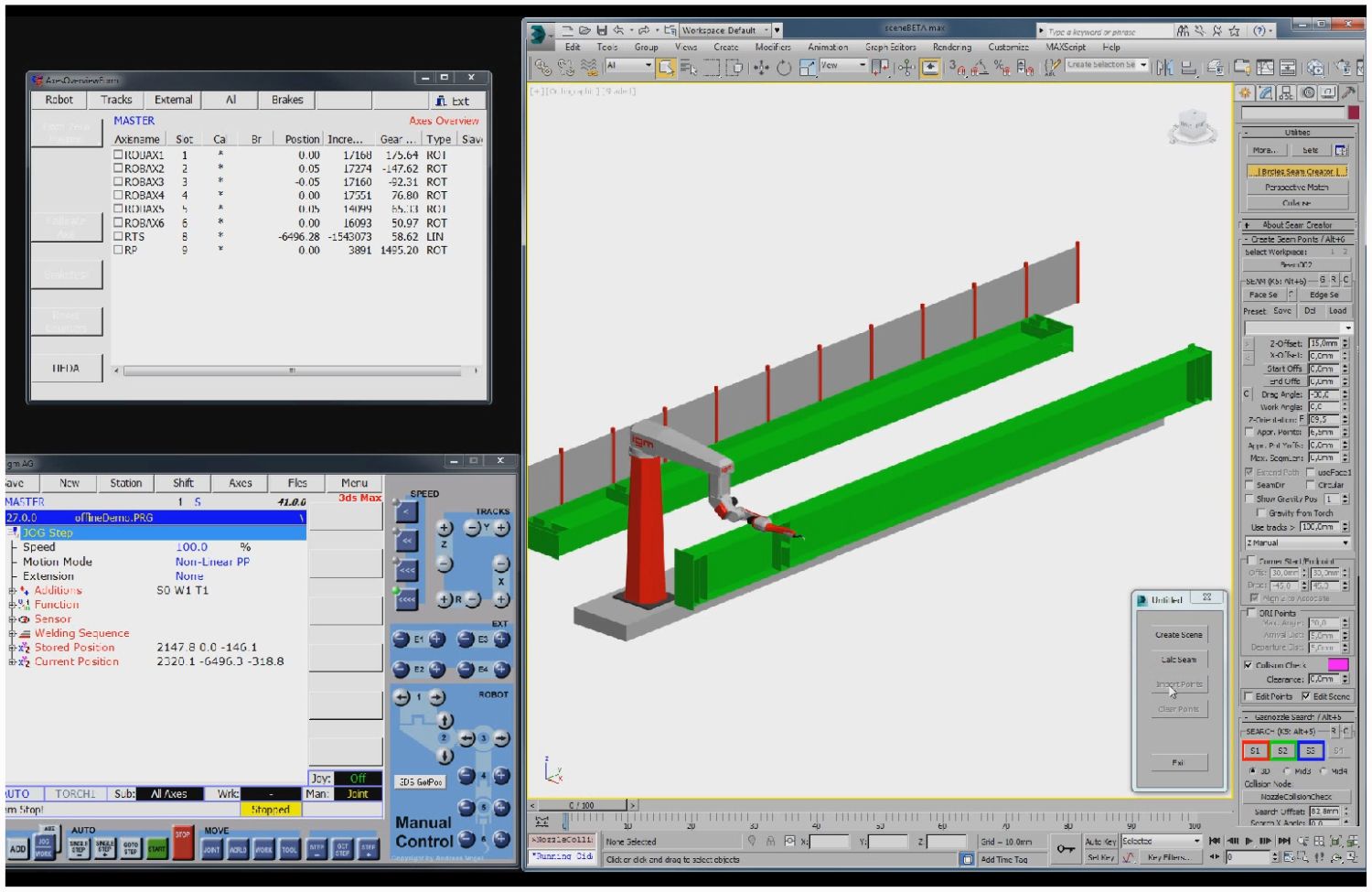
Special features:
- Seam Creator – automatically generation of welding seams by simple clicking on the both surfaces
- Intermediate Points – generation of intermediate points for smooth torch movement
- Search Drives – automatically search drives for the generation of intermediate jogging movements
- iCAM offline – template creation with virtual camera